Project code: SME-2008-1-232523
ES programme: Framework Programe 7 (FP7)
The objective of the project
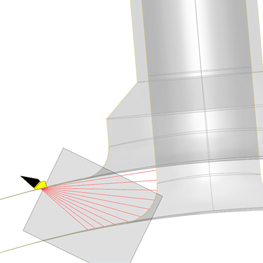
To design an automated robotic scanning system that will improve the reliability and speed of the inspection of the welded nozzle sections in nuclear and other safety critical facilities. The system will deploy a new and novel flexible phased array probe to perform a complete inspection of the nozzle weld, using an advanced navigation system to follow the complex weld profile.
Ultrasound institute
Performed modeling of various configurations of the phased array probe and developed an inspection technique of inner radius area of the weld.
Project partners
TWI (UK), Nexus (Bulgaria), Vermon (France), Peak NDT (UK), Iberdola (Spain), HES (Bulgaria), Kaunas University of Technology (Lithuania), Zenon (Greece).